Appearance
什么是无人机
“无人机”是“无人驾驶飞机”的简称,其英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。
无人机的分类
无人机按飞行平台构型分类,可分为5大类,即固定翼无人机、无人飞艇、扑翼无人机、伞翼无人机、多旋翼无人机。
固定翼

固定翼,顾名思义,就是机翼固定不变,靠流过机翼的风提供升力。
固定翼无人机起飞的时候需要助跑,降落的时候必须要滑行,但这类无人机续航时间长、飞行效率高、载荷大。
无人飞艇

飞艇是一种轻于空气的航空器,它与热气球最大的区别在于具有推进和控制飞行状态的装置,是一种理想的空中平台。
这类飞行器无论是用来空中监视、巡逻、中继通信还是空中广告飞行、任务搭载试验、电力架线,其应用范围是广泛的。
扑翼无人机

这类飞行器是从鸟类或者昆虫后启发而来的,具有可变形的小型翼翅翘。
扑翼飞行器有诸多优点:
1. 扑翼飞行器无需跑道垂直起落:
2. 动力系统和控制系统合为一体;
3. 机械效率高于固定翼飞机。
但其自身也存在着一些局限性:
1. 难以高速化、大型化;
2. 对材料有特殊要求。(材料要求质量轻,强度大)。
伞翼无人机

一种用柔性伞翼代替刚性机翼的飞机,伞衣充满后呈翼型的降落伞,伞翼大部分为三角形,也有长方形的。
多旋翼无人机

旋翼无人飞行器,其配备有多个朝正上方安装的螺旋桨,由螺旋桨的动力系统产生向下的气流,并对飞行器产生升力。
四轴旋翼无人机
桨叶的工作原理
无人机电机带动螺旋桨顺时针运动,桨叶螺距对空气作用的效果会产生一个向下的推力与水平方的推力。(如图2.4)
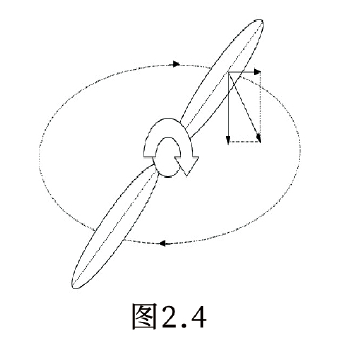
其中向下的推力是桨对空气的作用力,根据生顿第三定律原理,空气就会对桨产生一个向上的推力。水平方向同理。
认识正、反桨叶
螺旋桨有正和反桨之分。一般螺旋桨正面光滑,同时刻有相应的螺旋桨参数值。当该面朝前时,逆时针旋转产生拉力的为正桨,顺时针旋转产生拉力的为反桨。
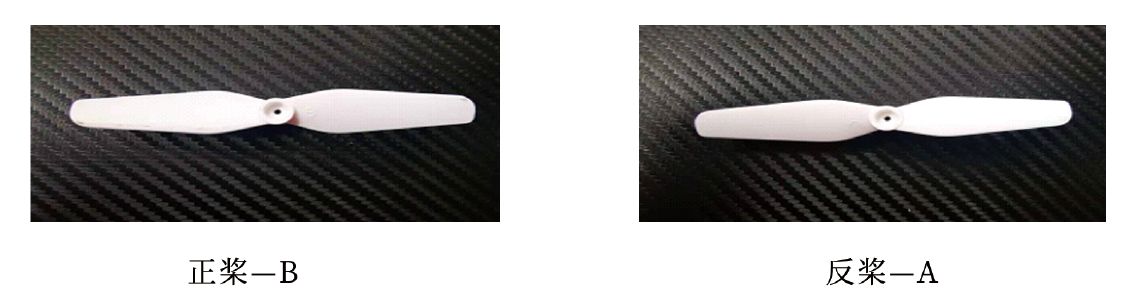
判断正、反桨叶的方法
大拇指指向螺旋桨前进的方向,四指方向就是止桨旋转方向,反之为反桨。飞虹FH系列和虹翼HY系列无人机中带有B标识的为正桨,A标识的为反桨。

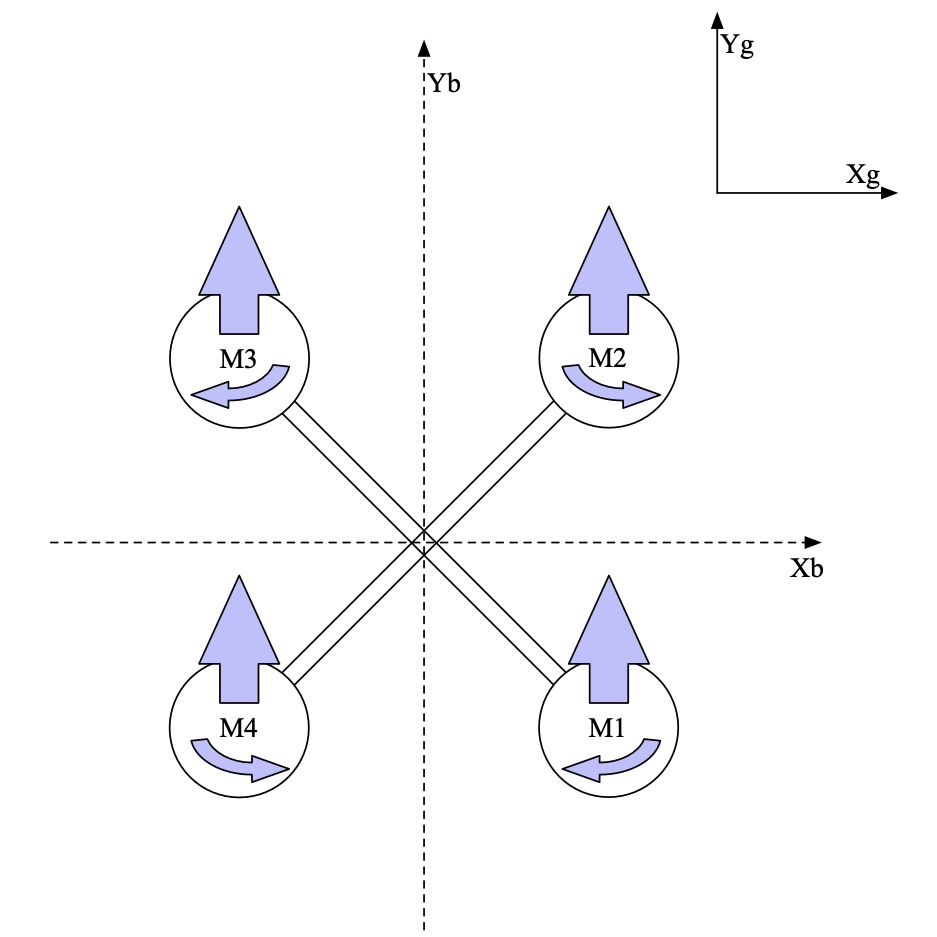
无人机的飞行姿态
当四旋翼无人机四个轴臂上的四个桨叶高速转动时,会受到四个桨的拉力,拉力方向与机身垂直。
- 悬停状态:当四个桨产生的拉力总和等于机身重力时
- 上升状态:当四个桨产生的拉力总和大于机身重力时
- 下降状态:当四个产生的拉力总和小于机身重力时
- 横滚、俯仰状态:保持垂直拉力同时,增加水平方向拉力
- 翻滚:当M2、M3瞬间加速,M1、M4瞬间失速时,无人向右翻滚陀螺仪发挥作用,无人机通过调节四个电机转速保持机身平稳。其他方向翻滚同理。
认识遥控器

遥控方式
遥控手柄多数默认为美国手操作方式,此外还有日本手和中国手操作方式。
美国手
| 左摇杆 | 上下拖动用于控制无人机上升与下降 |
|---|---|
| 左右拖动用于控制无人机悬停状态下的自旋 | |
| 右摇杆 | 上下拖动用于控制无人机向前与向后飞行 |
| 左右拖动用于控制无人机向左与向右飞行 |
日本手
| 左摇杆 | 上下拖动用于控制无人机向前与向后飞行 |
|---|---|
| 左右拖动用于控制无人机悬停状态下的自旋 | |
| 右摇杆 | 上下拖动用于控制无人机上升与下降 |
| 左右拖动用于控制无人机向左与向右飞行 |
中国手
| 左摇杆 | 上下拖动用于控制无人机向前与向后飞行 |
|---|---|
| 左右拖动用于控制无人机向左与向右飞行 | |
| 右摇杆 | 上下拖动用于控制无人机上升与下降 |
| 左右拖动用于控制无人机悬停状态下的自旋 |