Appearance
【基础编程】光流定位绕杆飞行
实验任务
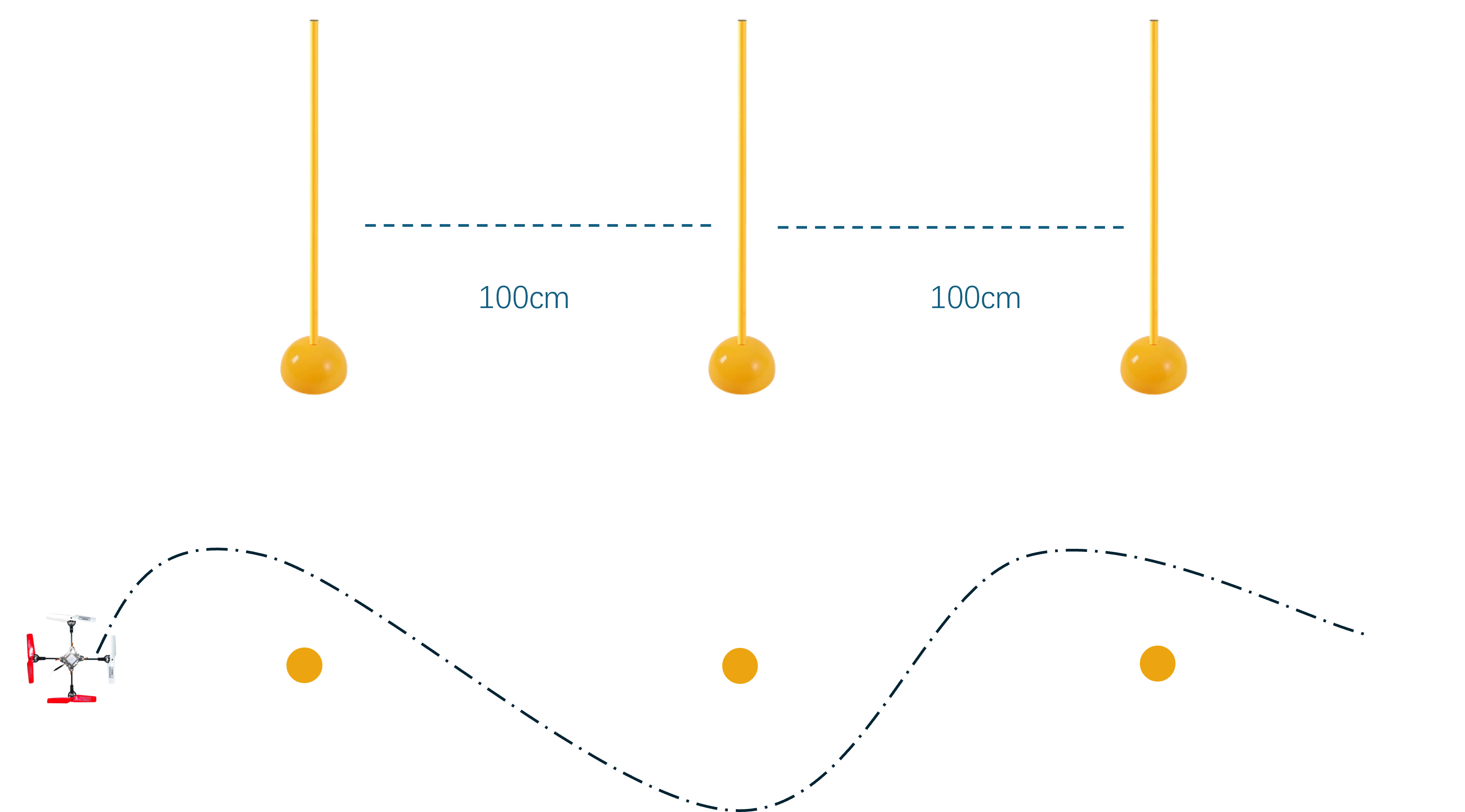
在摆放了竖杆的场地上,编程控制无人机进行连续绕杆飞行。任务场地布置和飞行路线示意如下,三根竖杆间隔 100 厘米摆放
实验讲解
我们使用最基础的光流定位计算距离的方式来实现。
光流定位(Optical Flow)是在计算机视觉和图像处理领域中,用来描述在图像序列或连续图片中,物体表面像素移动的模式。它通过分析图像序列中像素在时间域上的变化和相邻帧之间的相关性,来估算物体运动的速度和方向。

根据光流定位技术的原理,我们在设置飞行场地的时候需要注意,地面不能是全纯色的,而需要有颜色的深浅变化或者不同颜色的变化,这样才能实现对像素变化的跟踪计算从而准确估算飞行的距离。
参考程序
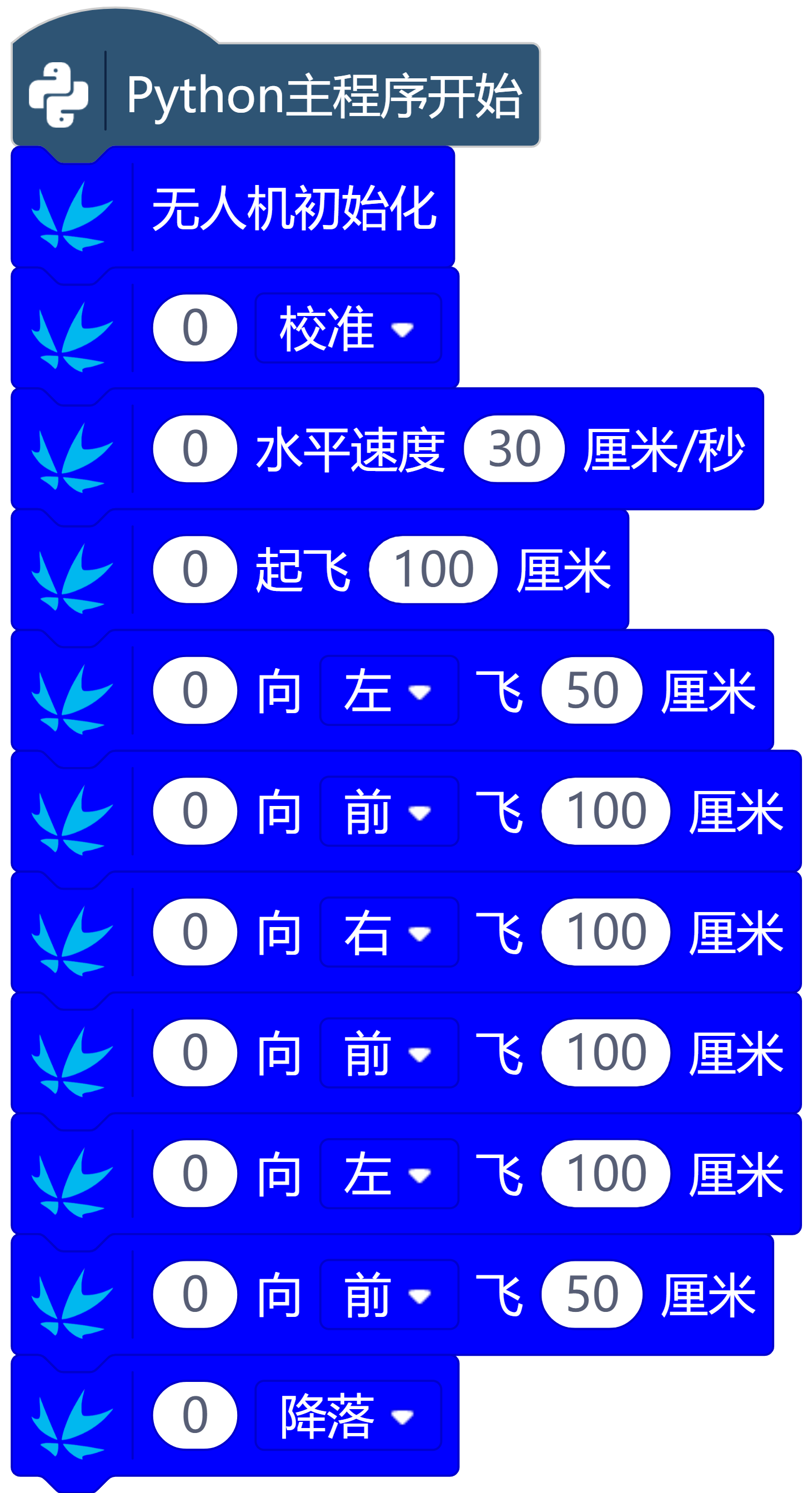
结合场地实际距离,我们可以很容易的编写出飞行控制程序。默认设置下,无人机使用光流模式进行飞行。
校准模块执行的操作就是陀螺仪校准,效果等同于双摇杆下拉的操作。
在场地中运行程序,观察飞行实际效果。
注意事项
我们会发现实际飞行距离会和我们估算的有偏差,偏差的原因有很多,比如光流定位估算的距离偏差,或者飞行速度太快,惯性太大引发的偏差等等。所以我们需要根据实际情况来调整飞行的距离,同时适当降低飞行的水平速度,来尽可能的达到良好的实际飞行效果。