Appearance
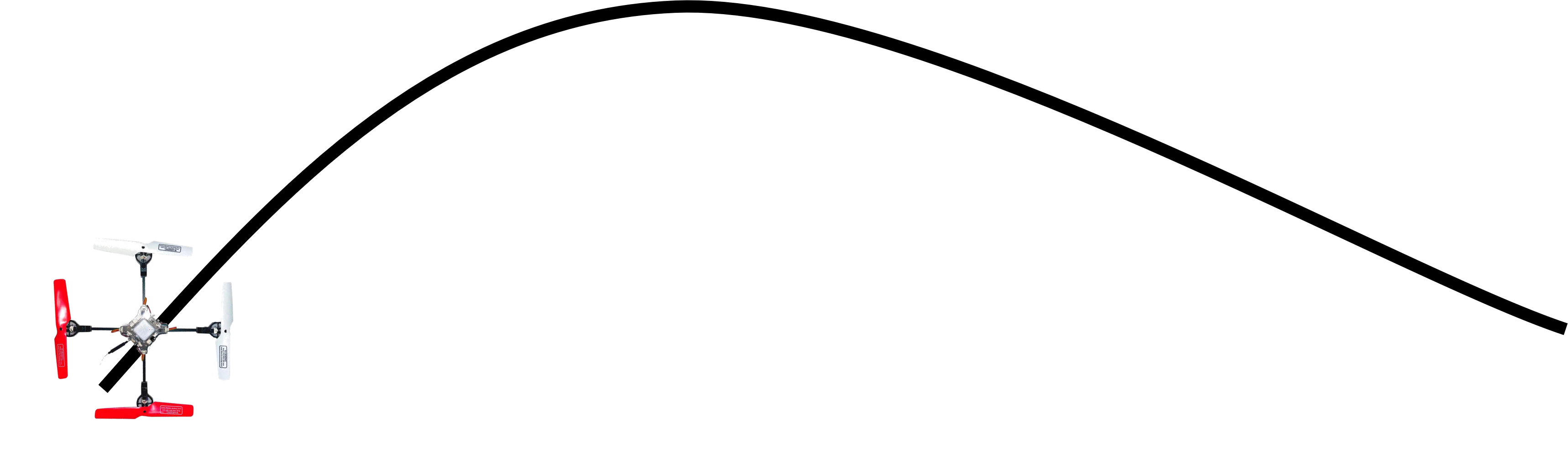
使用黑线电工胶带在地面上贴上一段弧线,编程控制无人机沿着黑线的引导线前进。
巡线功能是基于颜色识别原理,根据摄像头采集到的图像直线与中心偏离的位置计算出偏离角度,无人机通过计算角度偏离结果做出相应的调整。
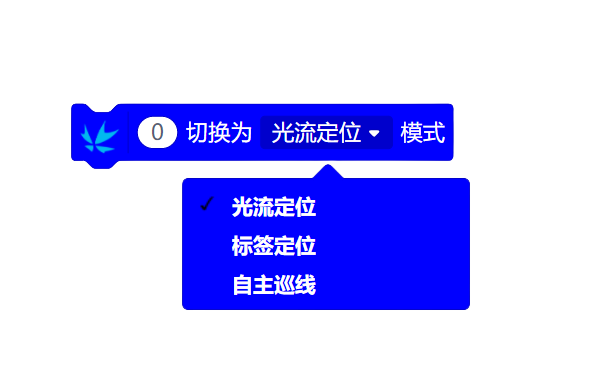
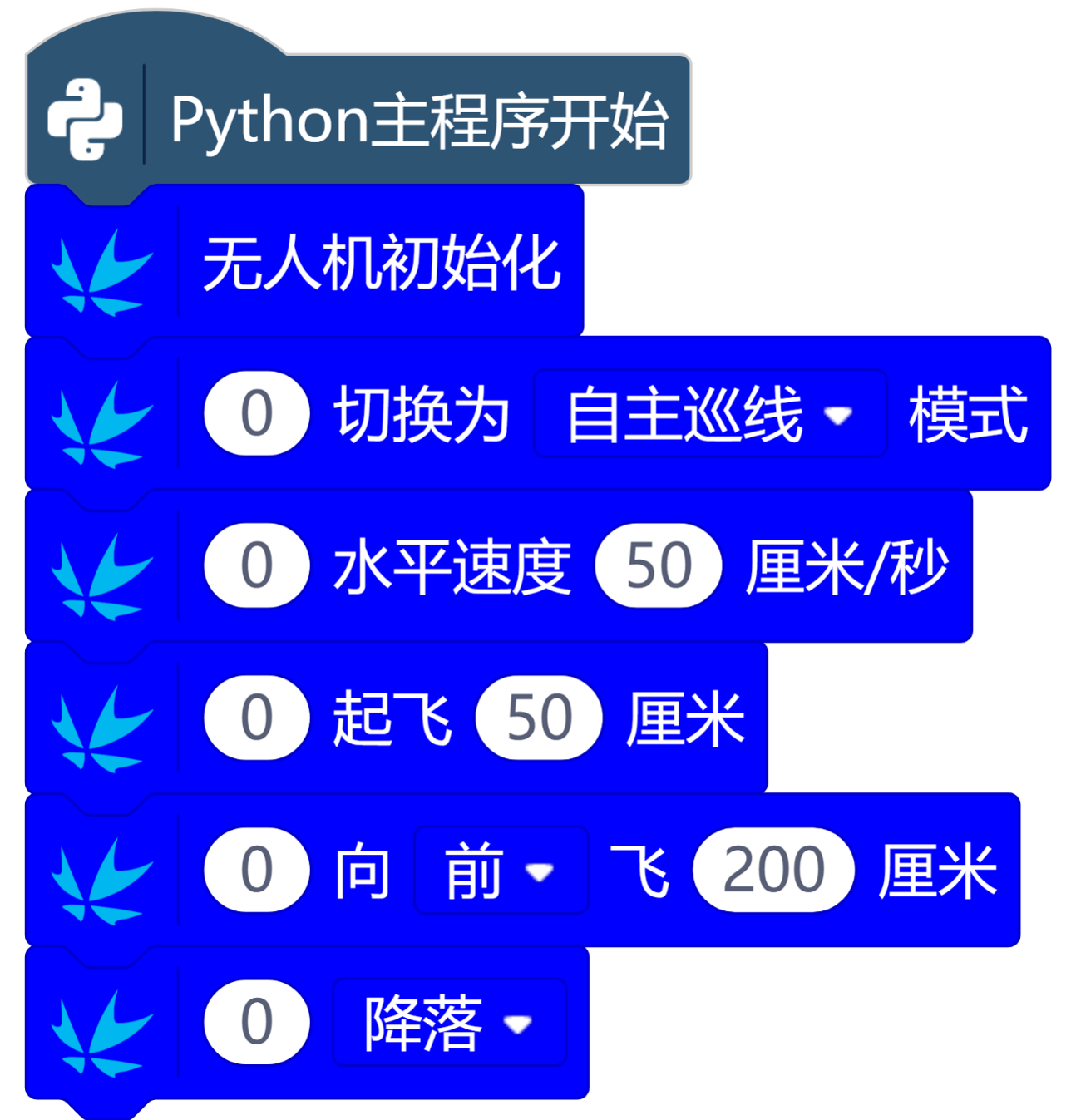
通过切换无人机的飞行模式,我们可以开启自主巡线功能。默认情况下仅识别黑色线条。
向前飞行的距离稍微比实际的线条距离长一点。