Appearance
【基础编程】标签定位穿越圆环
实验任务
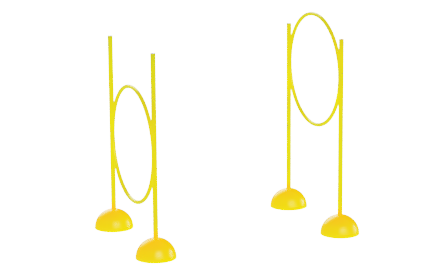
编程控制无人机飞行穿越高低不同的连续圆环,场地道具摆放参考如图所示。两个圆环的下边缘离地高度分别为40cm,60cm,圆环间距100cm。
实验讲解
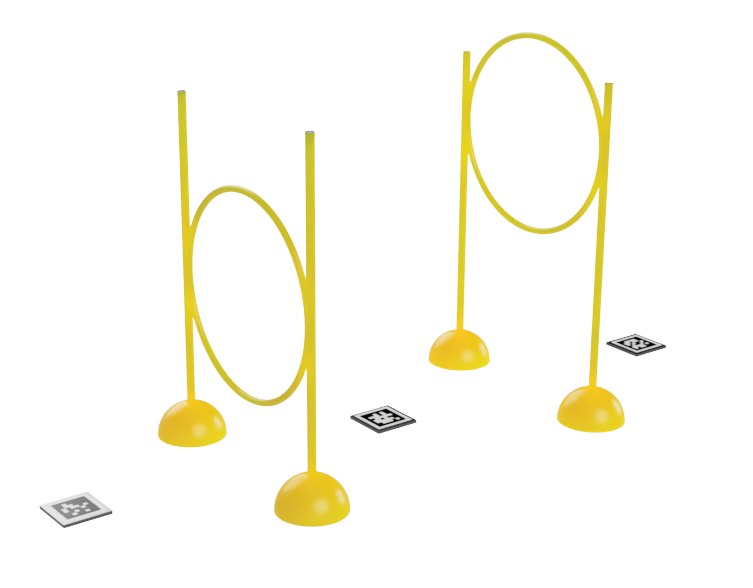
要顺利穿越圆环,无人机最好是能尽可能的处于圆环圆心的位置。我们可以利用视觉标签来定位无人机,使它的左右位置处于相对于圆环中心,同时控制好无人机的飞行高度。
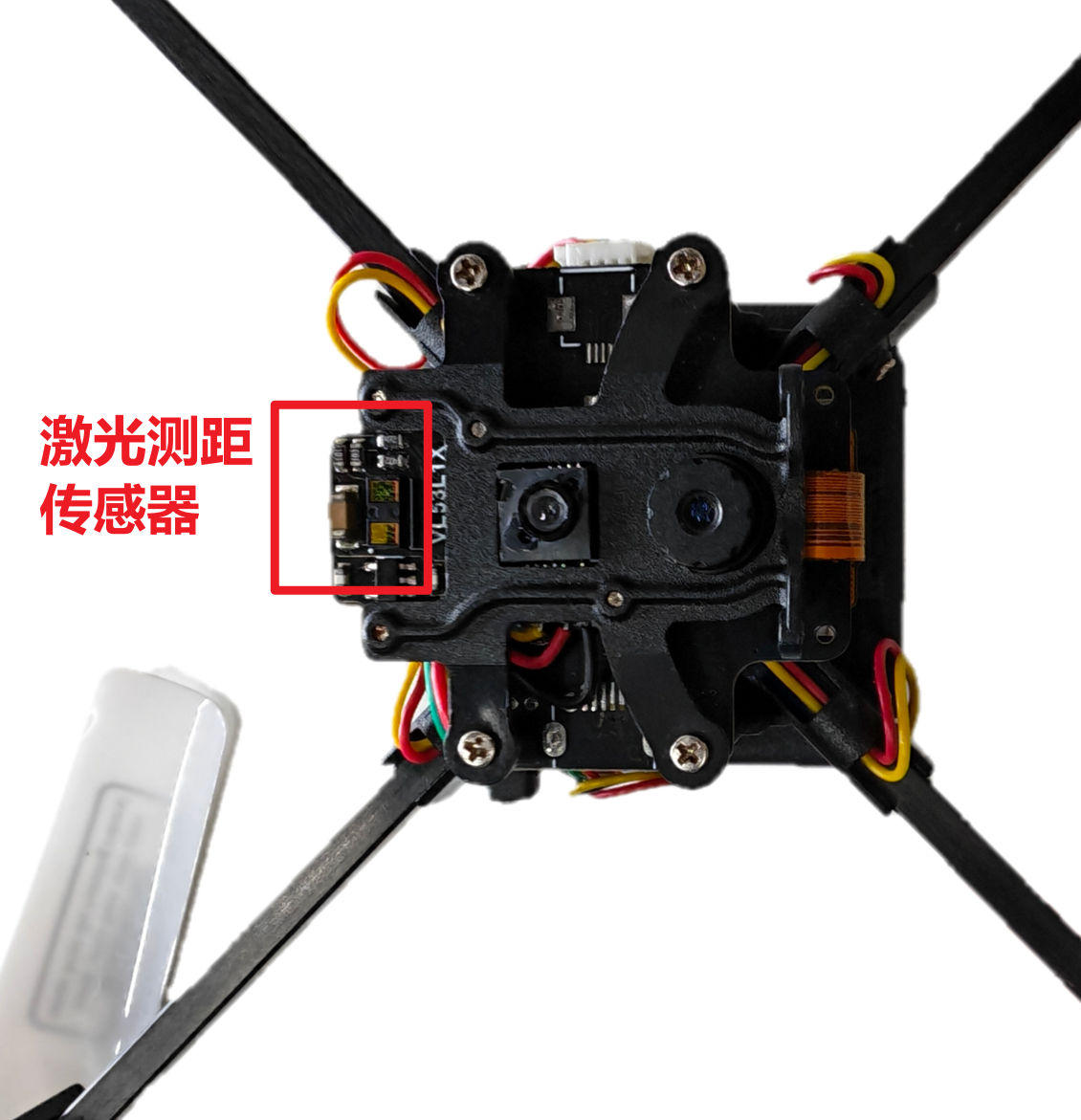
无人机保持稳定的飞行高度,是依靠气压传感器和激光测距传感器融合计算来进行控制的。
- 气压定高:不同的高度气压的大小是不同的,气压传感器可以测量出这其中的微小区别从而计算出高度信息。使用气压传感器定高不受地面高低起伏变化的影响,计算出来的高度是
当前高度和起飞点高度差。但是由于气压的大小受到环境的影响很大,所以仅使用气压传感器定高的话无人机很难保持长时间的稳定。 - 激光定高:激光测距传感器是通过往地面发射激光来测量相对高度,它的测量结果精度相对较高且比较稳定。在飞行过程中,它会不断的测量此刻
相对地面的绝对高度,并实时调整无人机姿态,因此如果在高低有起伏的场地内飞行,它就会出现忽高忽低的现象。此外,过强的太阳光会影响激光测距传感器的工作,因此不适合进行户外定高,同时在室内飞行也需要避免过强的太阳光照射。

无人机默认开启并使用激光定高功能,我们可以利用模块很方便的来设置无人机的飞行高度。

特殊情况下,我们也可以利用程序模块短暂的关闭激光测距功能,仅使用气压定高。

本节课的实验,我们将视觉标签摆放在圆环居中的位置,无人机在飞行中先定位标签修正位置,然后利用激光定高功能调整飞度高度穿越圆环。
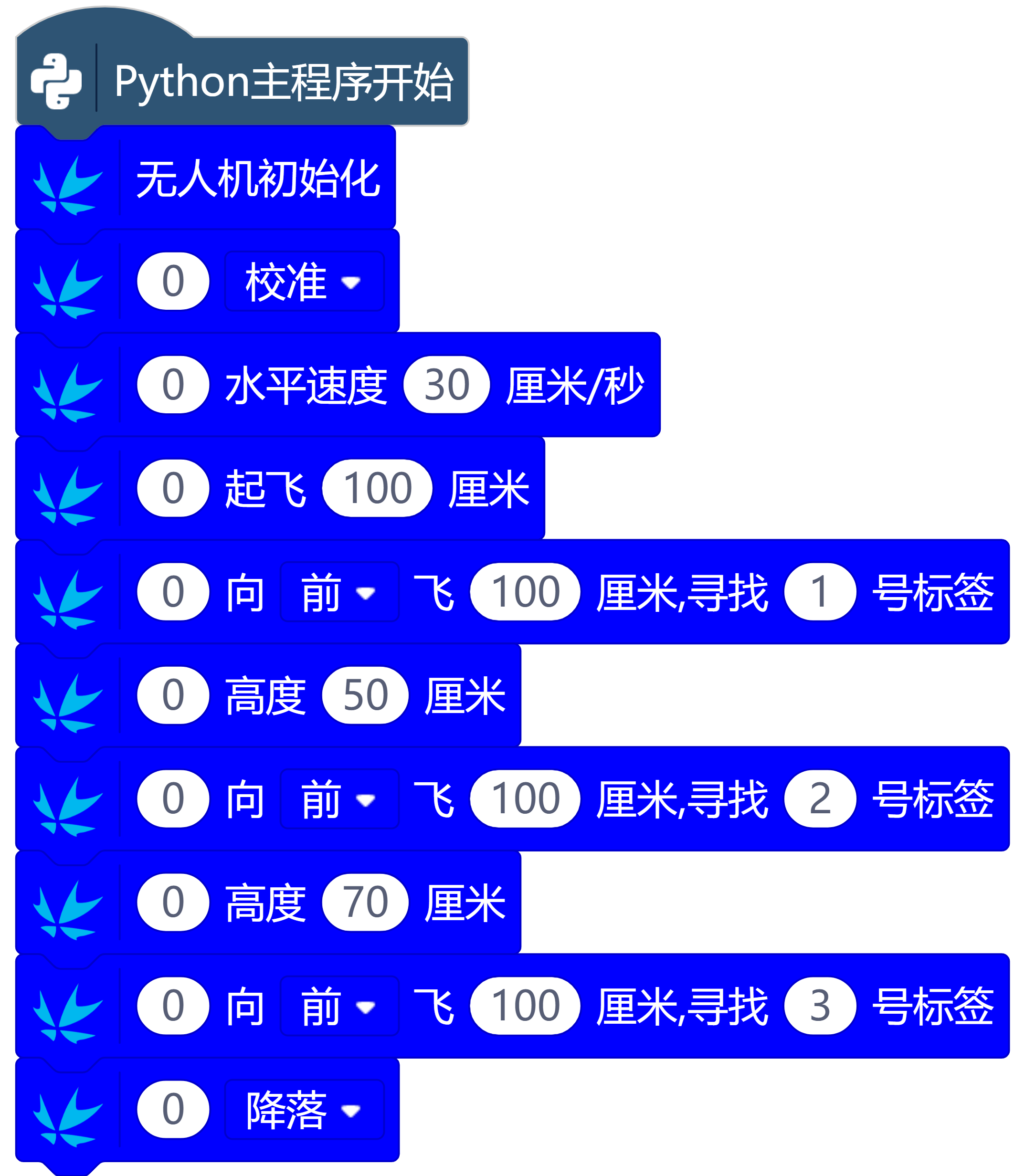
参考程序
飞行高度建议设置为圆环下边缘离地高度再增加10-15cm左右。在我们这个任务中,飞行穿越圆环的高度设置为50cm和70厘米。