Appearance
【基础编程】正弦环绕绕杆飞行
实验任务
前一节我们使用标签定位的方式进行了绕杆飞行,调试起来很简单,飞行稳定性也很好,但是每一次寻找标签进行定位,都需要停留等待一段时间,而且飞行的线路是横平竖直,整体上花费的时间比较长。本节我们将更进一步,用更加高效的飞行方法来实现连续绕杆动作。

实验讲解
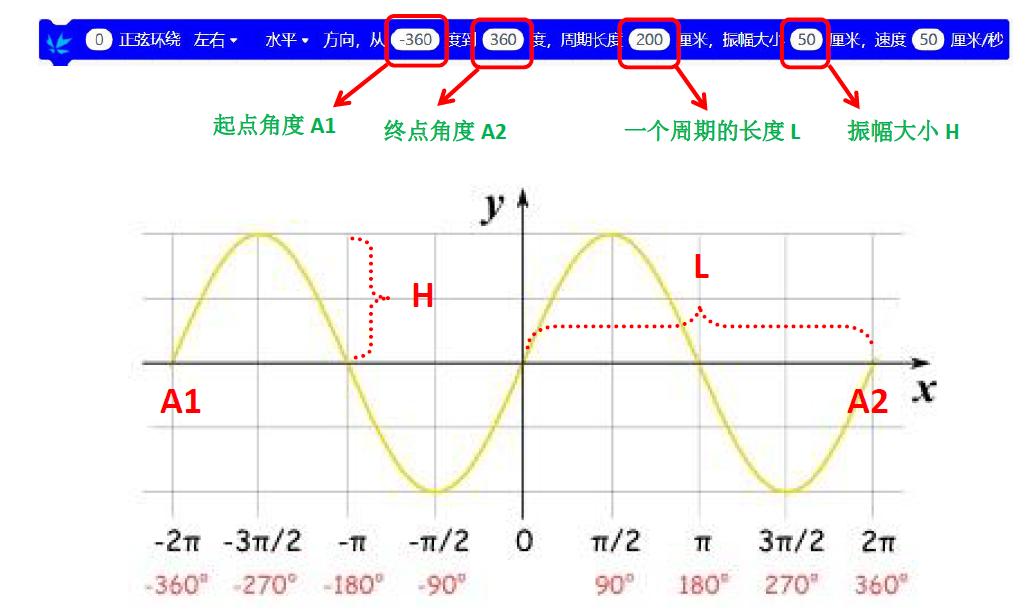
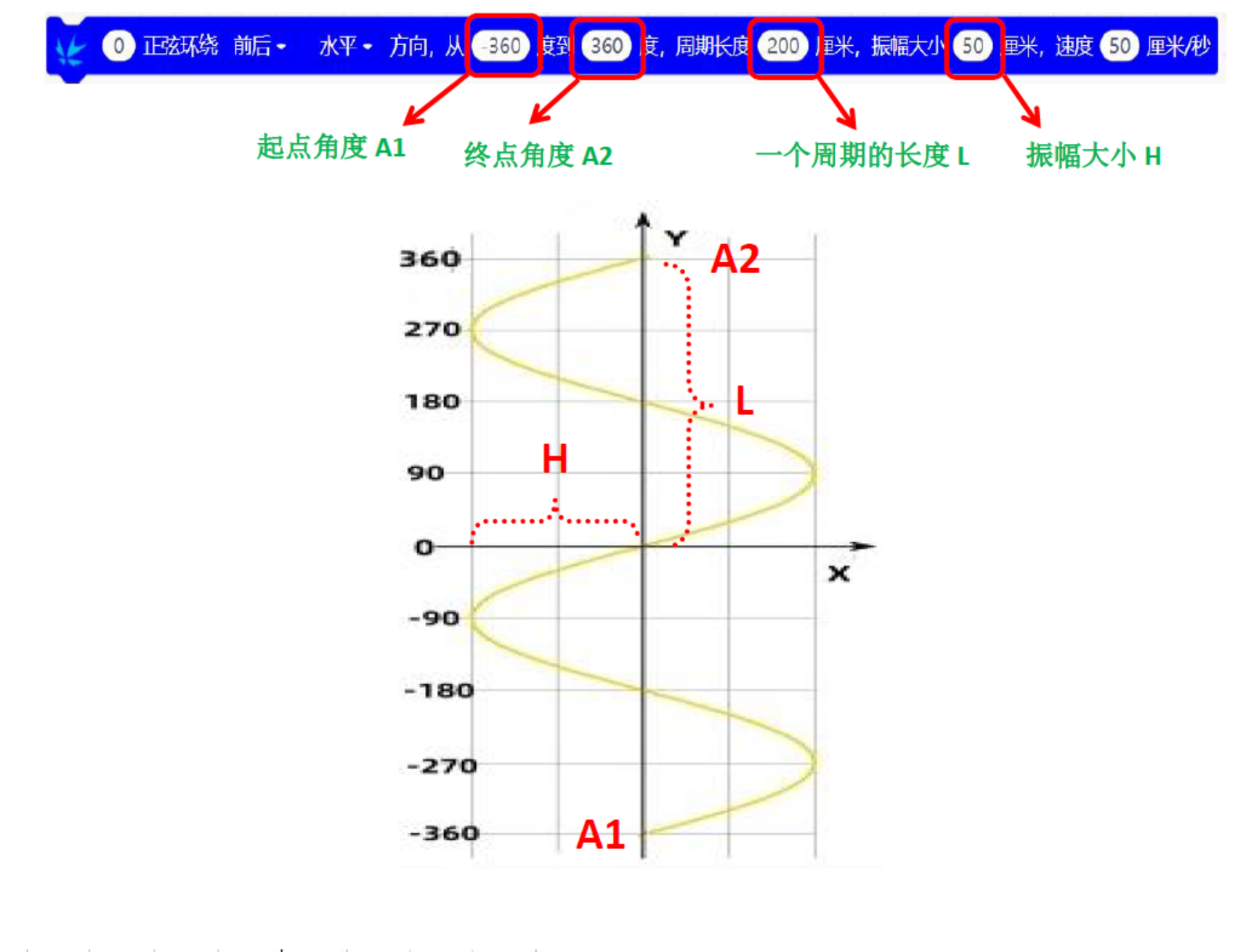
当我们需要进行连续绕杆的时候,无人机编程模块提供了一个正弦环绕的指令,可以控制无人机飞出一个类似正弦波的轨迹。
参考程序
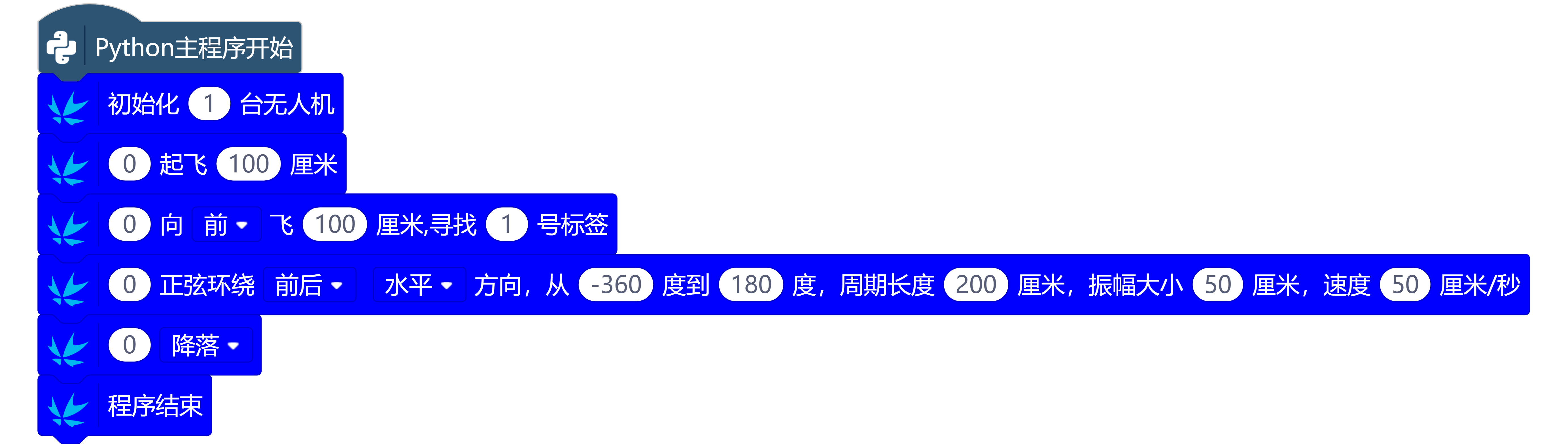
我们本节的任务是向前飞行的过程中进行绕杆,所以需要使用的模块是由于我们有 3 根连续的杆,角度可以选择从,摆放间距是 100cm,所以参数里面的周期长度设置为 ,振幅大小先设为默认的 50 厘米。
正弦环绕的起始位置也很重要,因为它直接决定了后续的飞行过程中会不会撞杆,我们可以在绕杆前加一个定位标签,放置的距离为杆距离的一半,50cm。