Appearance
【基础编程】标签定位绕杆飞行
实验任务
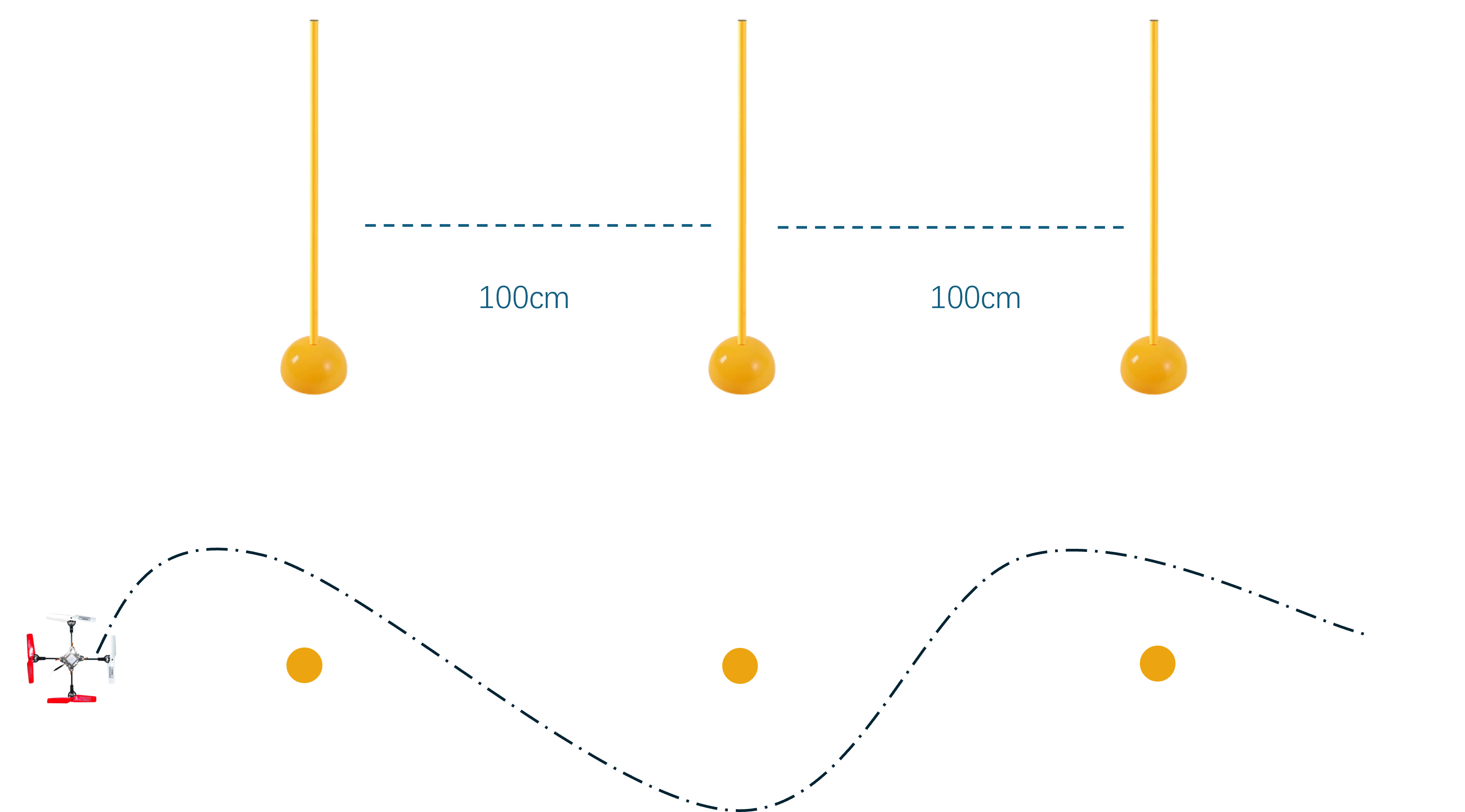
本节的任务我们依然进行绕杆飞行,场地布置与上一小节相同。任务场地布置示意如下,三根竖杆间隔 100 厘米摆放。
实验讲解
在仅使用光流定位飞行的时候,实际飞行的距离与我们预期的距离始终会有偏差,而且这种偏差只可能想办法减小,不可能完全消除。那么随着飞行线路的变长,这种偏差会逐渐积累,越飞越偏。在这种情况下,我们就可以引入视觉标签,让无人机在一些特定的位置,利用这个标签来进行定位校准,将每一段的飞行偏差进行纠正。
无人机定位标签采用是一种叫做AprilTag的视觉基准系统,它可用于各种任务,包括AR,机器人和相机校准。无人机的视觉摄像头模块中的检测程序可以计算相对于相机的精确3D位置,方向和id,从而利用它来校准自身的位置和姿态。
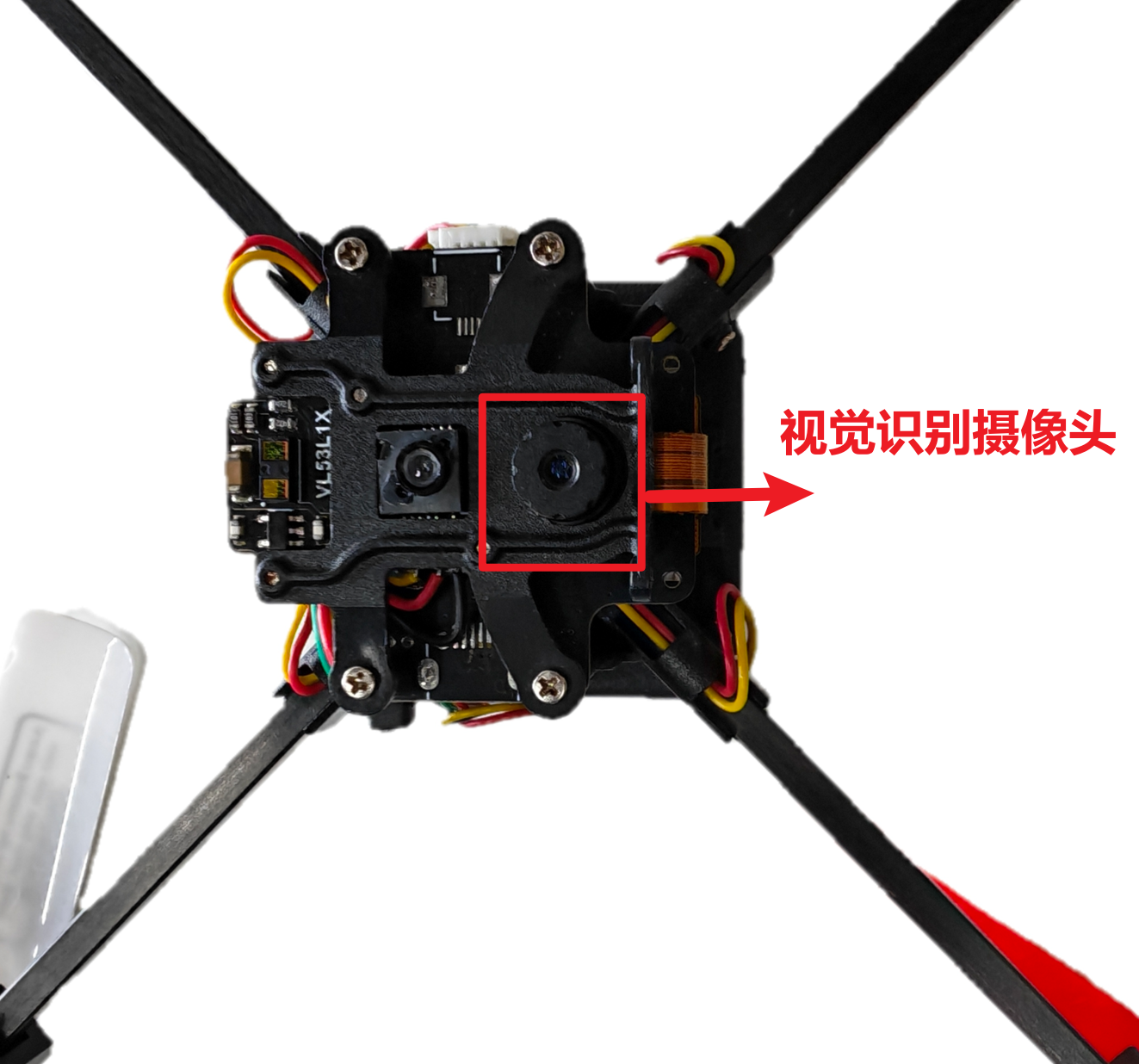


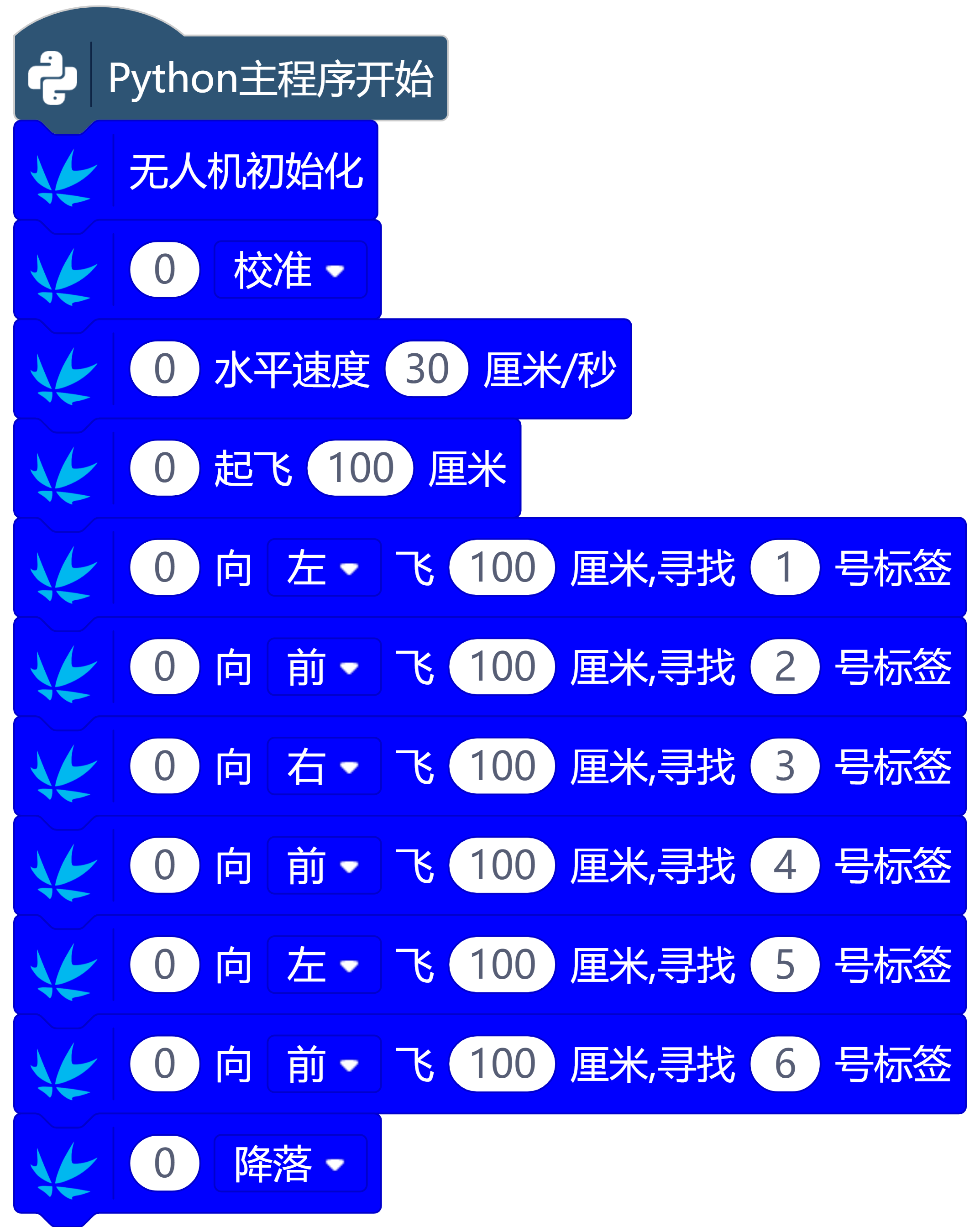
在Mind+中,我们可以使用下面这个模块来在实现飞行过程中的检测。它可以使无人机以光流模式往指定方向移动设定的距离,途中如果识别到指定编号的标签则自动切换为标签定位模式并悬停在该标签正上方,并且机头方向和标签方向自动对齐。

在资料包中\1、配套资料 (1)\1、配套资料\3、编队软件目录下有一个压缩包标签集,我们选择所需要的编号图片打印即可,一般我们的飞行高度为100cm,我们可以将标签打印的尺寸设置10cm X 10cm。将打印好的标签固定在场地上,摆放的位置参考如下图所示。
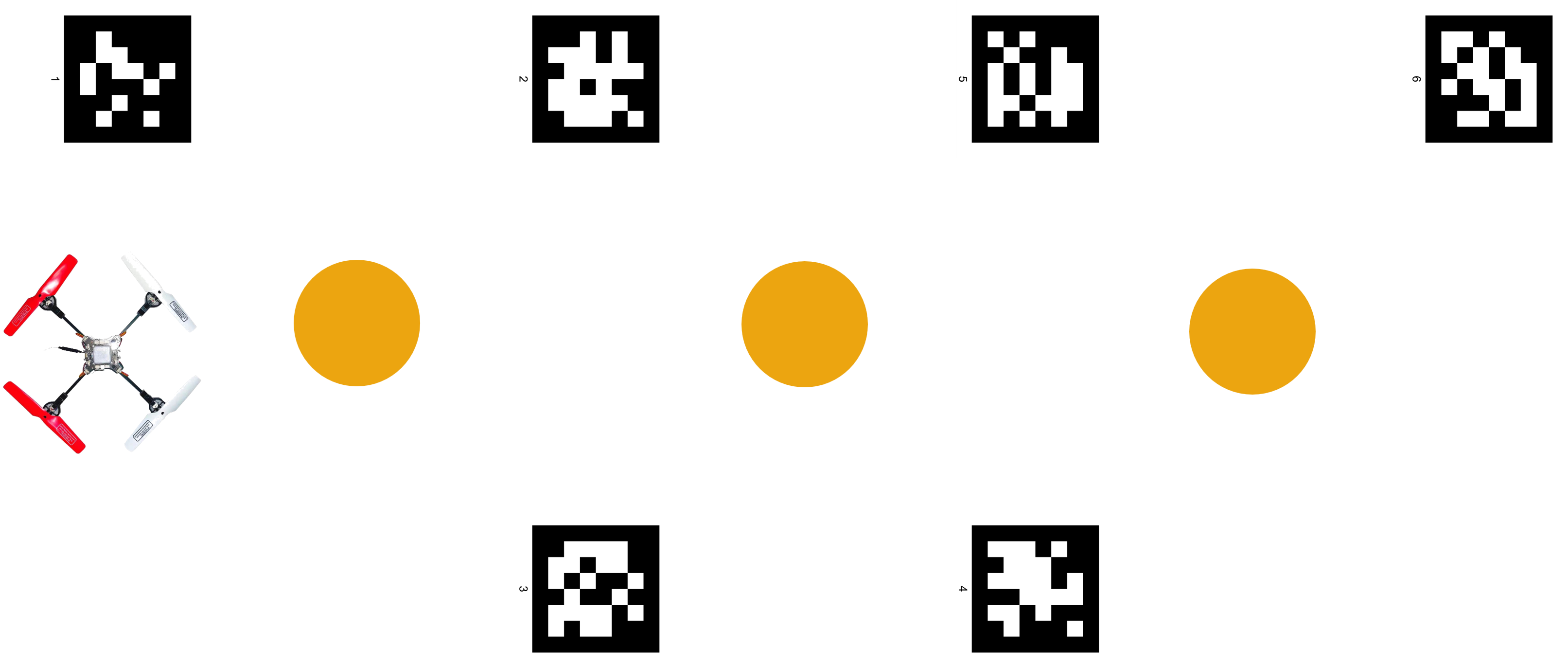
机头方向和标签方向自动对齐,在摆放标签的时候一定主要标签的正方向。
参考程序
在标签识别飞行模式下,飞行的距离可以设置的稍微多一点,确保无人机能正识别到标签。
在场地中运行程序,观察实际飞行效果。
应该可以发现,只要标签摆放的位置合适,我们几乎无需调整飞行距离参数就能很稳定的完成绕杆任务。即便我们每次飞行的距离多一点或者少一点,无人机只要能用视觉摄像头捕获标签信息,就能定位悬停在它的正上方,修正与地面的相对位置偏差。
注意事项
- 无人机的视觉摄像头需要完整的“看到”标签才能正确识别。如果飞的太低看不全或太高看不清,都有可能出现无法识别的情况。
- 无人机的水平飞行速度不宜设置太大,否则可能由于惯性太大即便识别到了也停不下来。